Комплектующие
В категории представлены необходимые комплектующие применяемые для разработки мобильных и манипуляционных роботов.

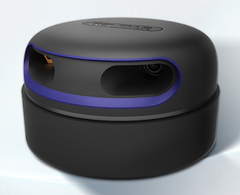
YDLIDAR TG15
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

YDLIDAR T5
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

RPLIDAR S2
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

RPLIDAR A3M1
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.
RPLIDAR A2M12
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене
RPLIDAR A2M8
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

RPLIDAR A2M7
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.
RPLIDAR A2M6
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

RPLIDAR A1
Лидар (LiDAR) - это технология дистанционного зондирования, которая использует лазерный импульс для сбора измерений, которые затем можно использовать для создания 3D-моделей, карт объектов и окружающей среды. LiDAR — это аббревиатура от Light Detection and Ranging – детекция света и расстояния. Соответственно принцип работы LiDAR следующий лазерный свет отправляется от источника (передатчика) и отражается от объектов на сцене. Отраженный свет обнаруживается приемником системы, а время пролета (TOF) используется для построения карты расстояний до объектов в сцене.

Зх колесная платформа Nexus на omni-колесах, 100мм
3х колесная платформа всенаправленного типа с корпусом треугольного сечения, диаметром omni колес 100мм. Оснащена ультразвуковыми дальномерами, микроконтроллером Arduino c платой I/O расширения для управления DC моторами и другими периферийными устройствами. Допустимая нагрузка до 15кг.
Характеристики| Производитель: | Nexus |
| Категория Я.Маркет: | Конструкторы |
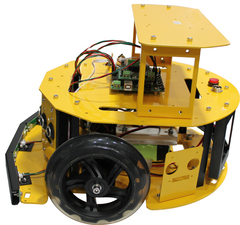
2х колесная платформа Nexus, 135мм
2х колесная платформа дифференциального типа, с корпусом круглого сечения и диаметром колес 135мм. Платформа оснащена бампером безопасности с датчиками прикосновения, ультразвуковыми дальномерами для обнаружения препятствий, микроконтроллером Arduino c платой I/O расширения для управления DC моторами и другими периферийными устройствами. Допустимая нагрузка до 10кг.
Характеристики| Производитель: | Nexus |
| Категория Я.Маркет: | Конструкторы |

4х колесная платформа Nexus на колесах Mecanum диаметра 100мм
4х колесная платформа всенаправленного типа с корпусом прямоугольного сечения, колесами Mecanum диаметром 100мм. Оснащена ультразвуковыми дальномерами для обнаружения препятствий, микроконтроллером Arduino c платой I/O расширения для управления DC моторами и другими периферийными устройствами. Допустимая нагрузка до 15кг.
Характеристики| Производитель: | Nexus |
| Категория Я.Маркет: | Конструкторы |

DYNAMIXEL XL430-W250-T
Интеллектуальный робототехнический привод с полностью интегрированным двигателем постоянного тока, а также контроллером, драйвером, датчиком, редуктором и сетью в одном сервомодуле постоянного тока.