





Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
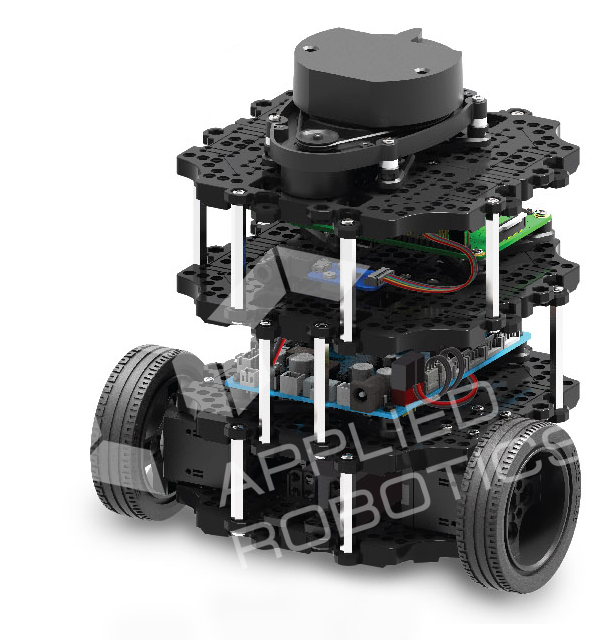
В состав комплекта входит мобильный робот TurtleBot3 Burger и программируемый одноплатный микрокомпьютер с интегрированным программным обеспечением для автономной навигации мобильных роботов.
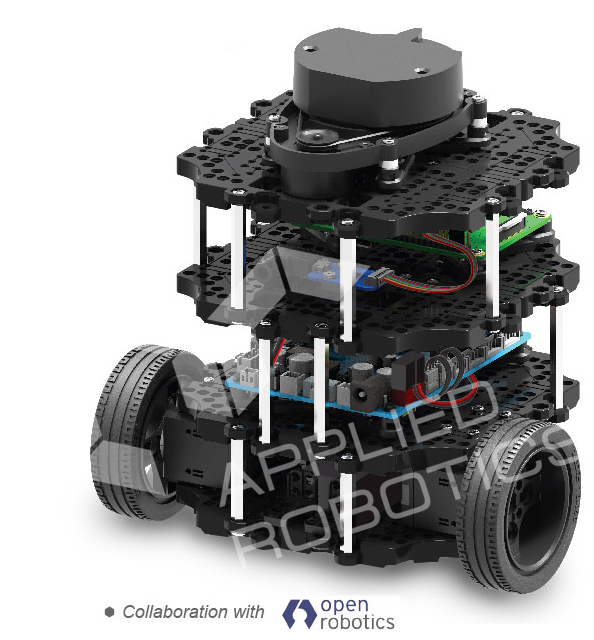
Основные компоненты:
|
|
 |
Применение специализированного навигационного программно-аппаратного комплекса дает возможность учащимся приступить к разработке систем управления на начальном уровне подготовки, осуществляя настройку параметров системы управления в графическом редакторе и программирование робота в среде Arduino IDE.


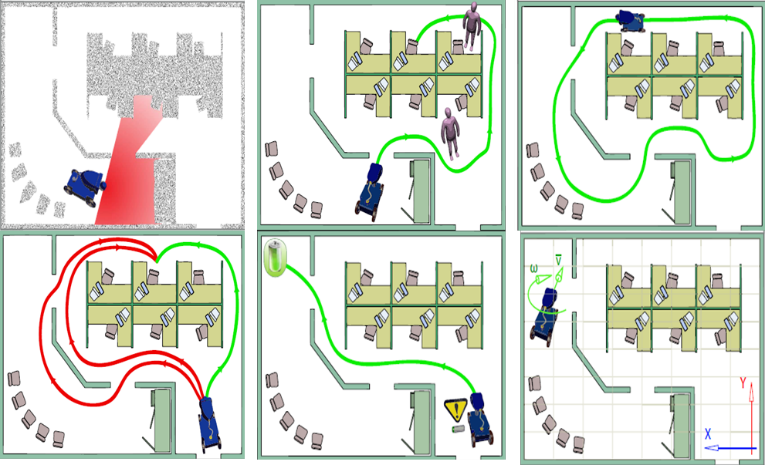
Функционал навигационного программно-аппаратного комплекса:
1) Построение плана окружающей обстановки;
2) Локализация положения мобильного робота;
3) Планирование маршрута движения между заданными точками;
4) Следование по маршруту движения.