


DYNAMIXEL — это эксклюзивный интеллектуальный привод для роботов, полностью интегрированный в один сервомодуль постоянного тока: двигатель постоянного тока, контроллер, драйвер, датчик, редуктор и сеть .
Серия MX — это новая концепция DYNAMIXEL с расширенными функциями, такими как точное управление, ПИД-регулирование, 360-градусное позиционное управление и высокоскоростная связь.
|
Название модели |
MX-28T |
|
Микроконтроллер |
ARM Cortex-M3 (72 МГц, 32 бит) |
|
Входное напряжение |
Мин. [V] 10.0 | Рекомендуемое [V] 12.0 | Макс. [В] 14.8 |
|
Характеристики производительности |
Напряжение [В] 12.0 |
|
Непрерывная работа |
Напряжение [В] - |
|
Разрешение |
Разрешение [град/импульс]: 0.0879000000 |
|
Датчик положения |
Абсолютный бесконтактный энкодер (12 [bit], 360 [deg]) |
|
Рабочая температура |
Мин. [°C] -5 / Макс. [°C] 80 |
|
Мотор |
Coreless (Maxon) |
|
Скорость передачи данных |
Мин. [бит/с] 8,000 Макс. [бит/с] 4 500 000 |
|
Алгоритм управления |
PID (ПИД регулятор) |
|
Материал шестерни |
Металл |
|
Материал корпуса |
Инженерный пластик |
|
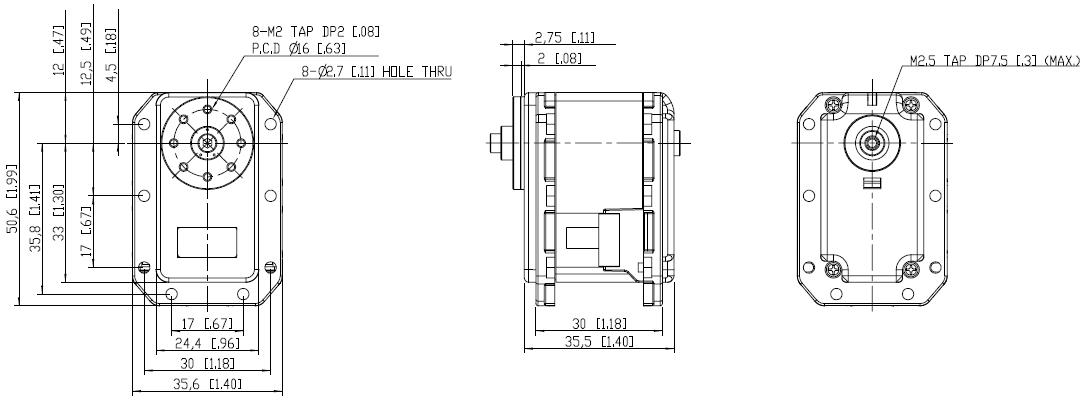
Габариты (ШⅹВⅹГ) [мм] |
35,6 x 50,6 x 35,5 |
|
Вес [г] |
72.00 |
|
Передаточное отношение |
193 : 1 |
|
Люфт |
- |
|
Сигнал управлеия |
Digital Packet |
|
Тип протокола |
Полудуплексная асинхронная последовательная связь (8 бит, 1 стоп-бит, без контроля четности) |
|
Физическое соединение |
TTL Level Multidrop Bus |
|
Максимальное число моторов, объединенных в сеть |
0 ~ 253 |
|
Обратная связь |
Положение, температура, нагрузка, входное напряжение и т. д. |
|
Версия протокола |
Протокол 1.0 (По умолчанию), Протокол 2.0 |
|
Режим работы / Угол |
Wheel Mode:Endless turn (Управление по скорости) |
|
Выходная мощность [Вт] |
- |
|
Ток в режиме ожидания [мА] |
100 |