RPLIDAR A2 это 360 градусный 2D лазерный сканер последнего поколения – решение, разработанное компанией SLAMTEC. Он может достигать 16000 вычислений в секунду при высокой скорости вращения. Оснащенный запатентованной SLAMTEC технологией OPTIMAX, он преодолевает ограничения по сроку службы традиционной лидарной системы, обеспечивая стабильную работу в течение длительного времени.
RPLIDAR A2M12 - это усовершенствованная версия 2D лазерного дальномера. Система может выполнять 2D-сканирование на 360 градусов в диапазоне 12 метров. Сгенерированное 2D облако точек данные могут быть использованы при картографировании, локализации и моделировании объектов/окружающей среды.
Общие характеристики
Основные характеристики:
- Диапазон расстояния (м) - 12 (белые объекты), 10 (темные объекты)
- Угловой диапазон (°) - 0 - 360
- Поле сканирования (°) - -1,5 – 1,5
- Минимальное рабочее расстояние (мм) - 0,2
- Угловое разрешение (°) - 0,225
- Частота дискретизации (Гц) - 16000
- Скорость сканирования (Гц) - 5 – 15 (10)
- Вес (г) - 190
- Диапазон температур (°С) - 0 – 40 (20)
Характеристики лазера:
- Длина волны лазера (нм) - 775 – 795
- Мощность лазера (мВт) - 10 (норм) – 12 (макс)
- Длительность импульса (мкс) - 60 (норм) – 90 (макс)
- Класс безопасности лазера - IEC-60825 Class 1
Коммуникационный интерфейс:
- Интерфейс связи - TTL UART
- Полоса пропускания (б/с) - 256000
- Рабочий режим - 8N1
- Выходное напряжение (high, В) - 2,9 – 3,5 (HIGH)
- Выходное напряжения (low, В) - 0.4 (LOW)
- Входное напряжение (high, В) - 1,6 – 3,5 (HIGH)
- Входное напряжение (low, В) - -0,3 – 0,4 (LOW)
Электропитание и потребление:
- Напряжение системы сканера (В) - 4,9 – 5,2
- Пульсация напряжения системы сканера (мВ) - 20 (рекомендовано) – 50
- Пусковой ток (мА) - 2500
- Пусковой ток системы (мА) - 1500
- Ток питания - 200-220 (спящий режим, 5В), 450-600 (рабочий режим, 5В)
Характеристики коммуникационных интерфейсов
|
Наименование сигнала |
Описание |
Значение |
|---|---|---|
|
Интерфейс ядра |
||
|
VCC (Красный,Power, В) |
Питание для ядра сканера дальности |
4,9 – 5,2 |
|
TX (Желтый,Output, В) |
Последовательный выход для ядра сканера дальности |
0 –3,5 |
|
RX (Зеленый, Input, В) |
Последовательный вход для ядра сканера дальности |
0 – 3,5 |
|
GND (Черный,Power, В) |
Заземление для ядра сканера дальности |
0 |
|
MOTOCTL (Синий, Input, В) |
Скан двигателя /ШИМ Управляющий сигнал (активный высокий уровень, внутренний, понижающий) |
0 – 5 (3,3) |
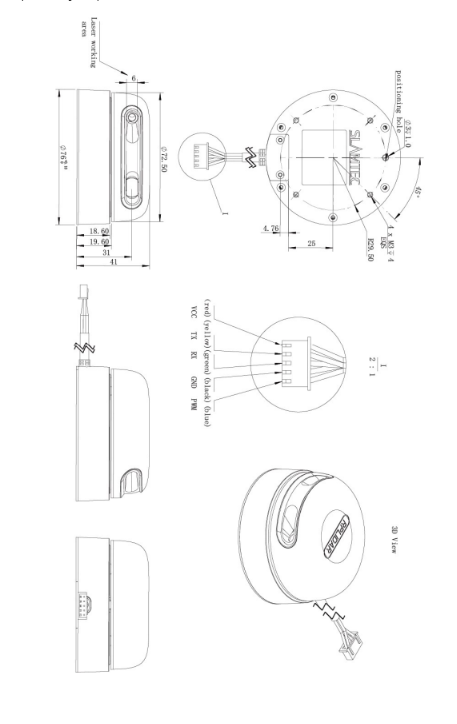
Чертеж устройства
Комплектация устройства
- Модуль лидара RPLIDAR A2
- Адаптер USB
- Micro-USB кабель
- Кабель питания