


Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
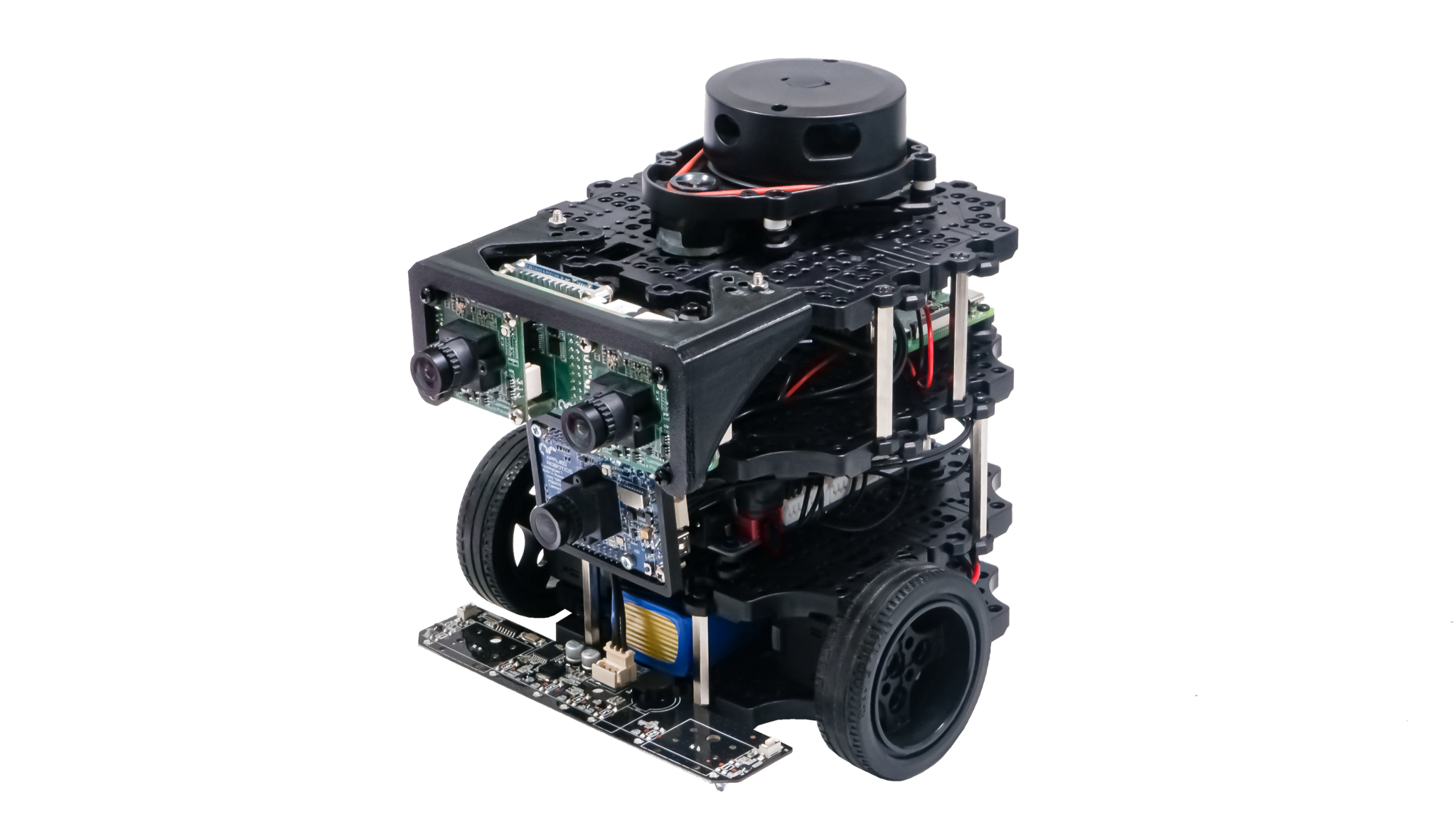
Продвинутый набор для разработки автономных мобильных роботов позволяет сконструировать блочно-модульную конструкцию мобильного робота, применяемого учащимися в образовательном процессе для углубленного практико-ориентированного изучения основ разработки систем управления автономных мобильных роботов.
В состав мобильного робота должно входить:
- Привод ведущих колес - не менее 2 шт.
Привод должен представлять собой электромеханическую сборку на основе двигателя постоянного тока, редуктора, датчика положения вала, система управления привода должна обеспечивать возможность объединения приводов с помощью последовательного интерфейса, возможность задания параметров контуров управления, управление вращением привода по скорости и положению, контроль нагрузки. - Программируемый контроллер - не менее 1 шт.
Программируемый контроллер должен обладать интерфейсами - USB, UART, TTL, RS485, CAN для коммуникации с подключаемыми внешними устройствами, а также цифровыми и аналоговыми портами ввода/вывода. - Одноплатный микрокомпьютер - не менее 1шт.
Одноплатный микрокомпьютер должен представлять собой устройство с архитектурой микропроцессора ARM, должен обладать не менее 2 вычислительными ядрами с тактовой частотой не менее 1ГГц. - Лазерный сканирующий дальномер - не менее 1шт.
Лазерный сканирующий дальномер должен обеспечивать диапазон измерения дальности до объектов не менее 2.5 метров и сектор сканирования не менее 360 угловых градусов. - Датчик линии – не менее 3 шт.
Датчик должен обеспечивать детектирование линии на контрастном фоне и передавать данные в программируемый контроллер о ее наличии путем передачи аналогового сигнала, цифрового сигнала и путем передачи цифрового пакета данных. - Датчика цвета – не менее 1 шт.
Датчик должен различать цветовой оттенок расположенного рядом с ним объекта в RGB нотации и обеспечивать передачу данных в программируемый контроллер о значении каждого цветового канала в виде цифрового пакета данных. - Массив ИК-датчиков - не менее 1шт.
Массив ИК-датчиков должен быть предназначен для отслеживания линии для движения мобильного робота. Массив должен содержать не менее 6шт ИК-датчиков, расположенных на одной линии. - Система технического зрения - не менее 1 шт.
Система технического зрения должна представлять собой вычислительное устройство со встроенным микропроцессором(кол-во ядер - не менее 4шт, частота ядра не менее 1.2 ГГц, объем ОЗУ - не менее 512Мб, объем встроенной памяти - не менее 8Гб), интегрированной телекамерой и оптической системой (максимальное разрешение видеопотока, передаваемого по интерфейсу USB - не менее 2592x1944 ед.). Модуль технического зрения должен обладать совместимостью с различными программируемыми контроллерами с помошью интерфейсов - TTL, UART, I2C, SPI, Ethernet.
Система технического зрения должна обеспечивать возможность изучения основ применения алгоритмов машинного обучения и настройки параметров нейросетей. Система технического зрения должна обеспечивать функционал распознавания различных геометрических объектов по набору признаков, распознавания графических маркеров типа Aruco и др, распознавания массивов линий и элементов дорожных знаков и разметки.
Система управления мобильного робота должна позволять осуществлять анализ окружающей обстановки в процессе движения мобильного робота и динамическом изменении окружающей обстановки, осуществлять формирование карты локальной обстановки вокруг робота и локализация положения робота на карте, построение глобальной карты окружающего пространства. Система управления мобильного робота должна позволять осуществлять анализ плана/карты окружающего пространства, обнаружение окружающих объектов, автономное планирование маршрута и объезда статических и динамических препятствий.

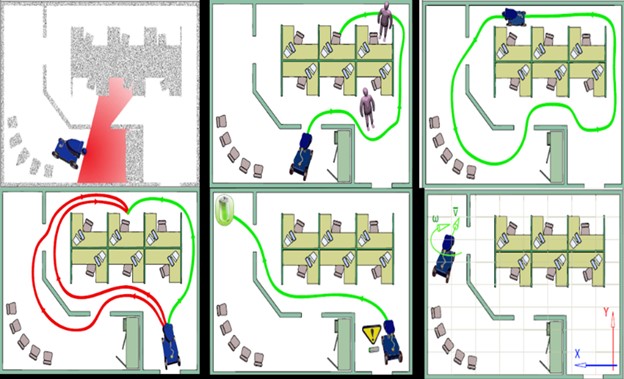
Система управления мобильного робота должна обеспечивать возможность разметку карты окружающего пространства на зоны с различными признаками, задаваемыми пользователем (зоны запрета для движения, ограничения скорости и т.п.). Система управления мобильного робота должна обеспечивать возможность задания точек и зон на карте окружающего пространства для автономного перемещения между ними. Система управления мобильного робота , включающая в себя подсистемы, такие как - система управления движением робота, система сбора и обработки сенсорной информации, система построения карты окружающего пространства и система навигации, должна быть реализована на базе программируемого контроллера и одноплатного микрокомпьютера, а также устройств, входящих в состав комплекта.
В состав комплекта должно входить программное обеспечение для программирования в текстовом редакторе на подобии Arduino IDE, программировании с помощью скриптов на языке Python, разработки систем управления на основе ROS. Так же в состав комплект должна входить виртуальная модель мобильного робота в виртуальном окружении для моделирования алгоритмов систем управления с помощью графической среды.