




Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.
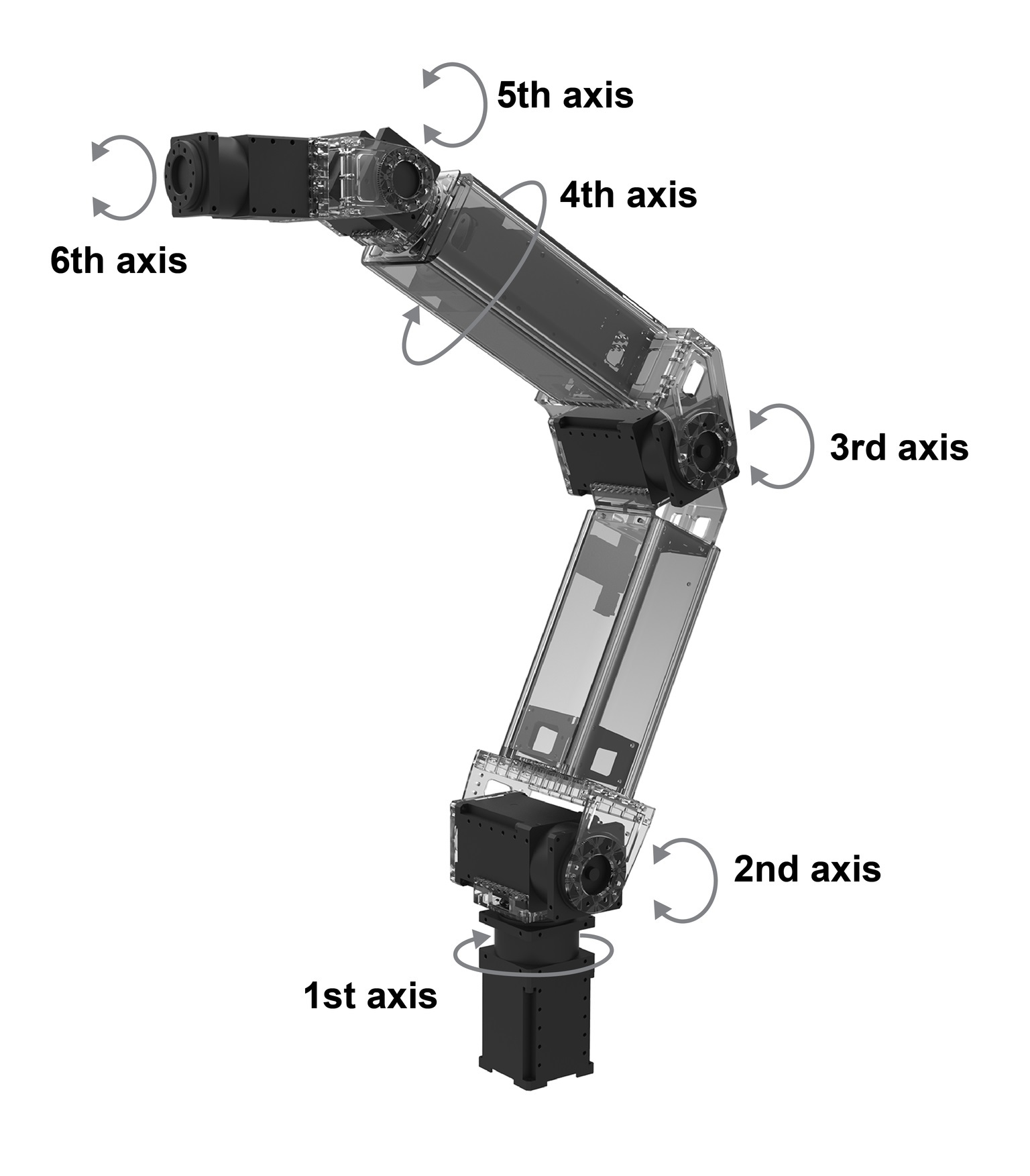
Учебно-лабораторный комплект на базе Manipulator-H представляет собой модель манипуляционного РТК (робототехнического комплекса), в основе которого лежит многоцелевой модульный манипулятор с шестью сервоприводами Dynamixel PRO-серии, объединенными в единую сеть с помощью последовательного интерфейса. Каждый сервопривод представляет из себя систему: электродвигатель постоянного тока + контроллер + датчик + сенсор + циклоидный редуктор. Модульная конструкция позволяет обслуживать манипулятор без больших затрат.
Технические особенности:
- Полезная нагрузка (кг) - 3 кг;
- Обладает высокой точностью позиционирования (мм): - ± 0,05;
- Скорость (каждое соединение, град / сек) - 180;
- Вес (кг) - 5.5;
- Предел досягаемости манипулятора (мм) - 645;
- Номинальное напряжение (VDC) - 24;
- Связь:RS-485 (Multi Drop Bus);
- Мощность:
- 200 Вт: 2EA,
- 100 Вт: 2EA,
- 20 Вт: 2EA; - Интерфейс USB, связь с сервоприводами осуществляется через протокол RS-485;
- Высокая скорость вывода (0,05 Нм/г);
- Высокая степень сопротивляемости ударным нагрузкам;
- Точный контроль и низкий люфт;
- Инкрементный датчик и бесконтактный магнитный датчик для абсолютного позиционирования;
- Управление крутящим моментом с использованием датчика тока;
- Алгоритм высокоточного измерения тока и управления токовой обратной связью;
- Управление положением, скоростью и током с использованием алгоритма;
- Встроенная функция технического зрения;
- Встроенный интерпретатор промышленного ПО;
- Простая среда разработки для программирования манипулятора;
Для управления манипуляционным роботом применяется модульный робототехнический контроллер, что обеспечивает возможность модернизации и расширения функциональных возможностей. Программирование возможно с помощью среды Arduino IDE и в ОС Linux. Технические особенности данного учебно-лабораторного комплекта позволяют применять его в рамках соревнований WS.