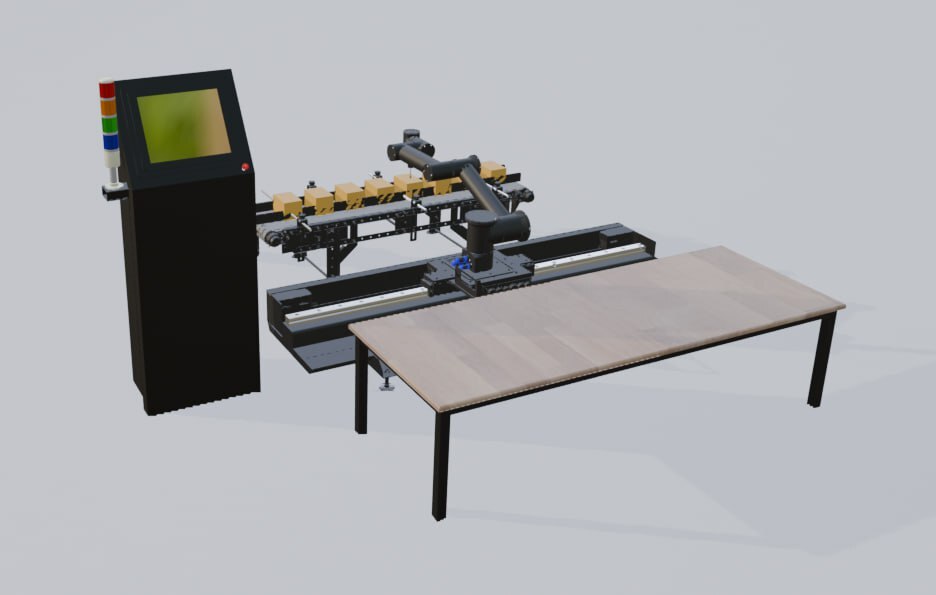

Учебная ячейка промышленного манипулятора ARM-IMR-95, разработанная для обучения.
Использование учебной ячейки в позволяет познакомить учащихся с принципами проектирования и построения манипуляционных роботов, основами создания управляющего программного обеспечения и основными принципами построения архитектур систем управления для гибких производственных ячеек.
Благодаря этому набору студенты смогут получить практические навыки по программированию промышленных роботов, настройке параметров их работы и эксплуатации различных типов инструментов. Это поможет им подготовиться к работе в условиях реальных производств, где требуется высокая квалификация персонала при выполнении сложных технических операций.
Таким образом, использование данного комплекта предоставляет уникальную возможность приобрести теоретические знания и отработать их на практике под руководством опытных преподавателей.
Комплектация:
- Многозвенный промышленный коллаборативный робот-манипулятор со сменным захватом (плоский схват, пневмосистема, присоски)
- Направляющий линейный трек
- Блок управления манипулятором
- Корпус ячейки
- Конвеерная лента
- Модуль технического зрения (смарт-стереокамера)
- Web-камера
- Стойка управления
- Светосигнальная лампа (промышленный светофор, смарт-устройство) 4 цвета
- Компрессор
- Зоны загрузки/выгрузки
- Комплект объектов конкурсного задания
- Сервер приложений (рабочая станция повышенной производительности для обучения нейронных сетей)
- Среда симуляции
- Система контроля версий