Универсальный робототехнический контроллер представляет собой модульное устройство на основе периферийного "Arduino-контроллера" на базе процессора AtMega2560 и встраиваемого одноплатного микрокомпьютера. Универсальный робототехнический контроллер применим для работы с элементной базой наборов - Lego, Arduino, VEX, Robotis и позволяет использовать комплектующие данных наборов одновременно в составе одной модели. Периферийная плата контроллера позволяет учащимся разрабатывать творческие проекты на основе DIY элементной базы Arduino-наборов начального уровня сложности. Встраиваемый одноплатный микрокомпьютер позволяет разрабатывать сложные системы управления на основе ОС Linux с применением различных алгоритмических библиотек и языков программирования С/С++, Python и т.п.
 |
|

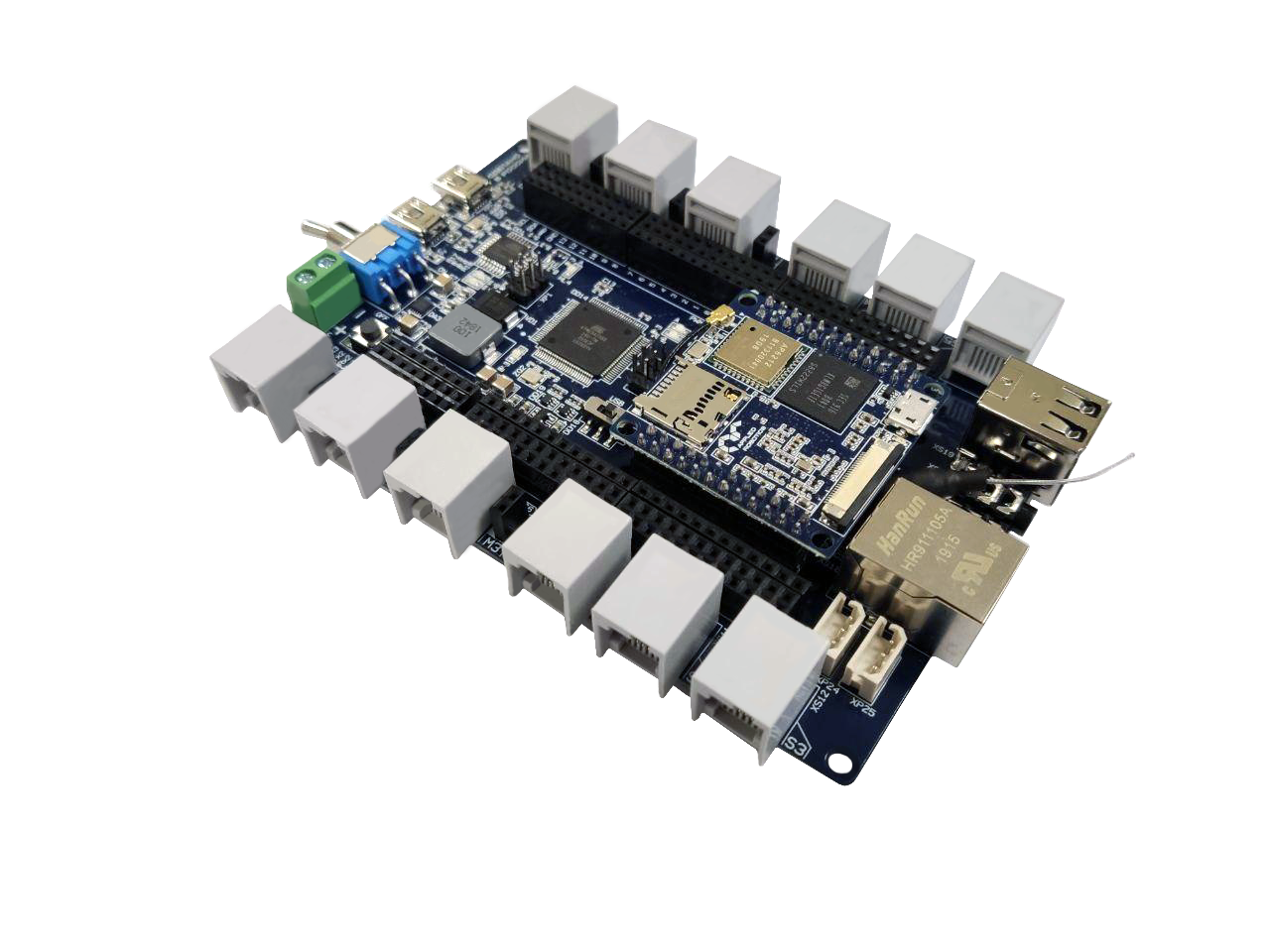
Универсальный робототехнический контроллер LAVR: а) – основной модуль; б) – встраиваемый одноплатный микрокомпьютер ООО «Прикладная робототехника».
Контроллер LAVR обладает портом расширения для установки дополнительных модулей, в том числе встраиваемого одноплатного микрокомпьютера ООО «Прикладная робототехника» (Рис. 1б), совместимого с аппаратным и программным обеспечением модуля NanoPi Neo Air компании FriendlyArm (далее NanoPi), что позволяет разрабатывать и исполнять высокоуровневые ресурсоемкие приложения для управления роботами на базе операционной системы Linux.
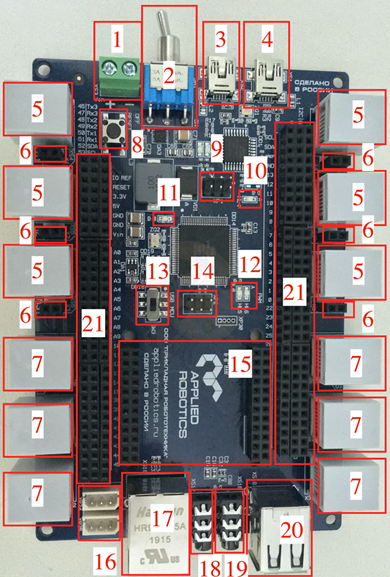
Основные элементы контроллера LAVR:
- Разъем для подачи питания.
- Выключатель.
- USB интерфейс для работы с NanoPi.
- USB интерфейс для загрузки в контроллер управляющих программ.
- Разъемы для подключения моторов Lego EV
- Разъемы для подключения моторов общего назначения.
- Разъемы для подключения датчиков Lego EV
- Кнопка Reset для перезагрузки контроллера.
- Разъем для обновления встроенного программного обеспечения микроконтроллера (МК) ATmega16U2, обеспечивающего обмен данными через USB интерфейс между компьютером и основным микроконтроллером ATmega
- Светодиод индикации загрузки и запуска управляющих программ.
- Светодиод индикации питания.
- Светодиоды индикации обмена данными между контроллером и модулем расширения NanoPi.
- Переключатель интерфейсов обмена данными между NanoPi, контроллером и USB (см. раздел «Переключатель интерфейсов»).
- Разъем для обновления встроенного программного обеспечения основного микроконтроллера ATmega
- Разъемы для подключения модулей расширения, в т.ч. NanoPi.
- Интерфейсы Dynamixel 3-х выводные на основе полудуплексного UART для подключения серво-приводов и датчиков Robotis.
- Интерфейс Ethernet 100 Мбит/с модуля NanoPi.
- Линейный стерео аудио вход модуля NanoPi.
- Линейный стерео аудио выход модуля NanoPi.
- Интерфейсы USB A ведущие (Host) High Speed для подключения периферийных устройств к модулю NanoPi.
- Arduino-совместимые интерфейсы ввода-вывода общего назначения, позволяющие так же подключать 3-х выводные датчики конструкторов Vex EDR.
Характеристики универсального робототехнического контроллера LAVR: